

工人日报-中工网记者 张翀 通讯员 姜胜来配资入门网
据湖北省科技厅消息,近日,由北京大学武汉人工智能研究院(简称:北武院)、北京大学人工智能研究院、北京通用人工智能研究院等单位联合组成的科研团队,开发出全球首个同时具备全手高分辨率触觉感知和完整运动能力的机器人手系统——“基于全手触觉的机器人仿生手”(简称F—TACHand),首次在保持完整运动能力的前提下,实现了机器手掌表面70%区域的高分辨率触觉覆盖,使机器人能够像人类一样通过触觉反馈进行精确操作和适应性抓取。该成果展示了我国在机器人前沿技术领域的创新能力,对推动机器人技术的自主创新和国产化具有重要意义。相关成果在国际顶级学术期刊《自然·机器智能》上发表。
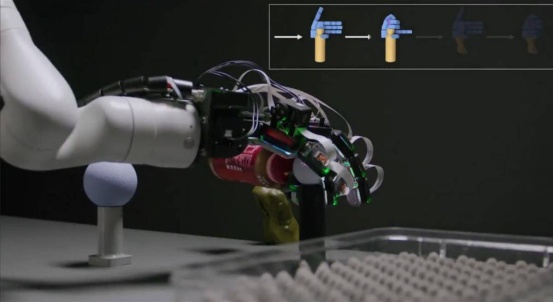
人的手部由27块骨骼和34块肌肉组成,提供了24个自由度的灵活性,具有结构高度复杂、功能极为精密等特点。手部在拿取物体时涉及“触觉反馈”与“运动功能”两大能力。以往的研究中,触觉反馈与运动能力的整合被认为是机器人研究领域中的关键挑战之一,对人类手部功能的研究是具身智能与机器人研究的前沿。
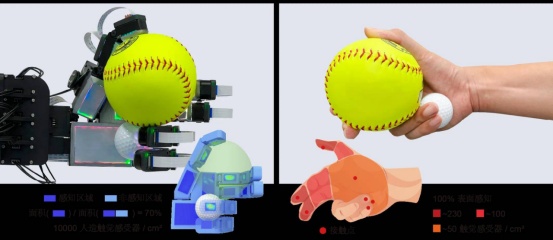
据介绍,高分辨率触觉传感器覆盖了该手部系统手掌表面70%的广大区域,空间分辨率达到0.1毫米,相当于每平方厘米约有10,000个触觉像素,远超目前商用机器手的触觉感知能力,目前最先进的ShadowHand仅在指尖提供单点力传感。F—TACHand借鉴了人类手部的生物结构,将17个高分辨率触觉传感器以6种不同配置集成,使其像人类手掌一样,在抓取过程中实时感知接触变化并迅速调整,极大提升了机器人在不确定环境中的操作稳定性。此外,研究团队还开发出生成人类多样化抓取策略的算法,涵盖了人类常见的19种抓取类型。
实验结果表明,相比没有触觉反馈的系统,F—TACHand在面临执行误差和物体碰撞风险时表现出显著的适应性优势配资入门网,平均成功率从53.5%提升至了100%。这项研究成果有望推动机器人技术在医疗、工业制造、特殊环境作业等领域的落地应用。
富灯网配资提示:文章来自网络,不代表本站观点。



